En la actualidad y desde mediados del siglo XX, el mundo de la Arqueología y el de la Arqueología Subacuática en particular ha sufrido un gran avance en cuanto a los medios técnicos y tecnológicos puestos a su disposición. Si bien, la metodología sólo ha evolucionado en su modo de enfoque del estudio histórico y contextual desde el punto de vista de las diferentes escuelas y corrientes.
Para la aplicación en la EXCAVACIÓN del método estratigráfico y el estudio sistemático de un yacimiento y sus restos ahora contamos con la ayuda de aparatos de medición topográfica que, aun existiendo con anterioridad, han sufrido el desarrollo de la era digital. Podemos hablar de la estación total digitalizada y conectada con ordenadores para posicionar los objetos en un espacio de tres dimensiones con ayuda de la fotogrametría (fotos desde varios planos del mismo objeto o del terreno para conseguir la tridimensionalidad, ahora con programas informáticos), los programas CAD y el escáner tridimensional para el terreno o para objetos individuales.
Todo ello integrado en los modernos y potentes programas SIG (Sistema de Información Geográfica) que nos proporcionan un estudio digital por capas en pantalla del ordenador y una base de datos relacionada de todos los elementos del terreno, desde los accidentes geográficos, toponimia, delimitación del yacimiento, estructuras, datos de excavación… hasta cada pieza hallada en su posición original.
Pero la verdadera revolución afecta a los nuevos elementos técnicos que se van a aplicar a la PROSPECCIÓN. Desde un barco podemos acudir, gracias a los modernos sistemas de posicionamiento vía satélite como el GPS o el GPS Diferencial (de extrema precisión centimétrica) sobre cartas náuticas digitalizadas, a cualquier sitio coordenado con anterioridad o iniciar una prospección programada previamente, con rutas ya trazadas sobre las cartas y que nuestro buque va a navegar incluso con el piloto automático accionado.
Estas rutas de prospección serán trazadas a la vez que “pasamos” diferentes sistemas de teledetección, como el sónar de barrido lateral (y la sonda multihaz) para dibujar en tres dimensiones la orografía del terreno o de posibles restos sobre el fondo, el magnetómetro de protones para la detección de objetos metálicos enterrados o no y el penetrador de lodos, capaz de dibujar penetrando en el interior del fondo marino descubriendo objetos enterrados o diferentes densidades de éste.
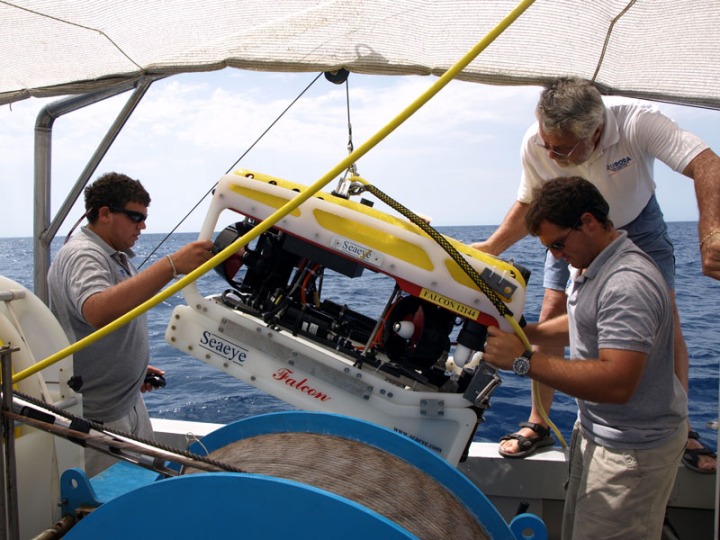
Muy útiles son también los mini-submarinos tripulados y con modernos aparatos de interactuación, brazos, cámaras, focos… para alcanzar profundidades prohibidas para un buceador y el ROV, robots teledirigidos de menor tamaño para alcanzar grandes profundidades, el interior de barcos hundidos, rápidas visualizaciones de objetos previamente detectados, etc. Pertrechados con brazos articulados y pinzas accionables desde superficie y sistemas de filmación e iluminación.